
Hand-eye calibration
A tutorial about robot arm hand-eye calibration
Language vision model tutorials
A list of language vision model(LVM) papers
Symforce tutorials
A tutorial for using symforce
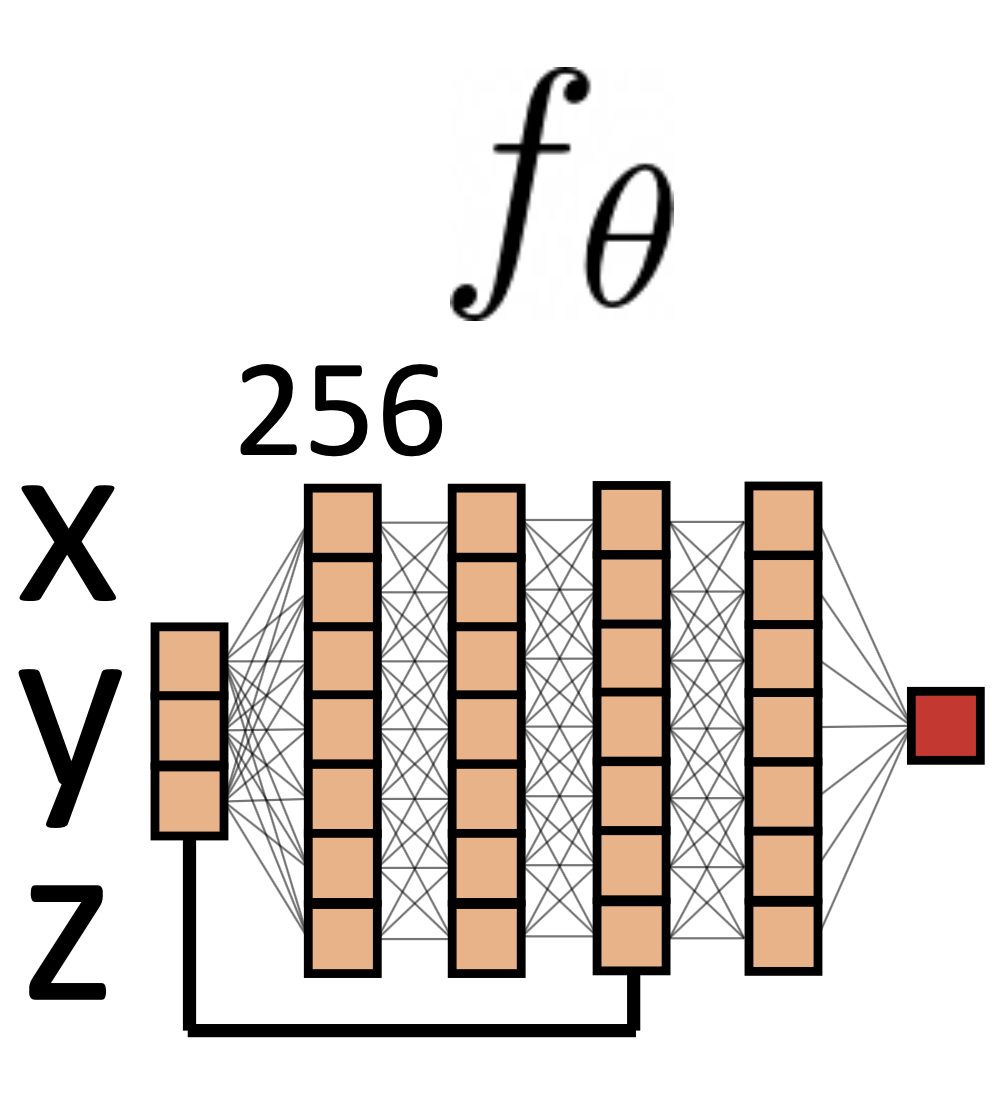
Implicit Mapping with DNN
A tutorial for representing maps using DNN
Inertial Navigation System
A tutorial for building INS using IMU.
Lie Theory for State Estimation in Robotics
A tutorial for Lie theory used in state estimation of robotics.
Continuous-time Estimation
A tutorial for continuous-time estimation.
Camera Notes
A tutorial for camera basics.
Gaussian Process Notes
A tutorial for Gaussian process based ground height prediction.
Docker Notes
A tutorial for using docker.
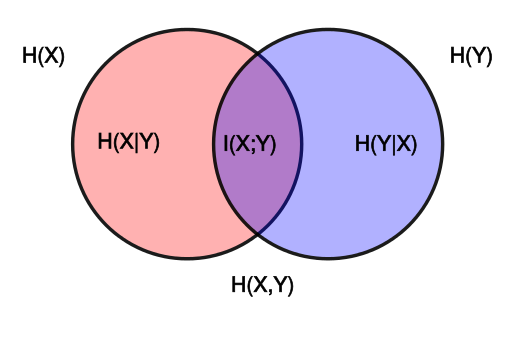
Mutual Information
A collection of equations related to entropy, cross entropy, conditional entropy, joint entropy, mutual information, KL divergence.
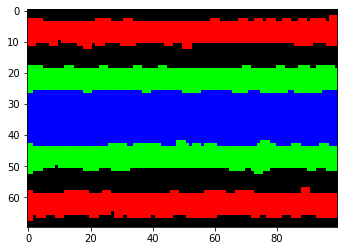
Grid Mapping: From Occupancy Map to Semantic Map
Grid mapping is an idea that divides continuous world into discretized cells or voxels. The occupancy grid map is designed to represent occupancy state of map cells. It is very useful for path planning as it shows free spaces. However, unlike robot vacuums, self-driving vehicle must follow rules that don't allow cars go on any free areas. Then a cell should represent more classes than pure a binary state. In such case, we call it semantic grid map.
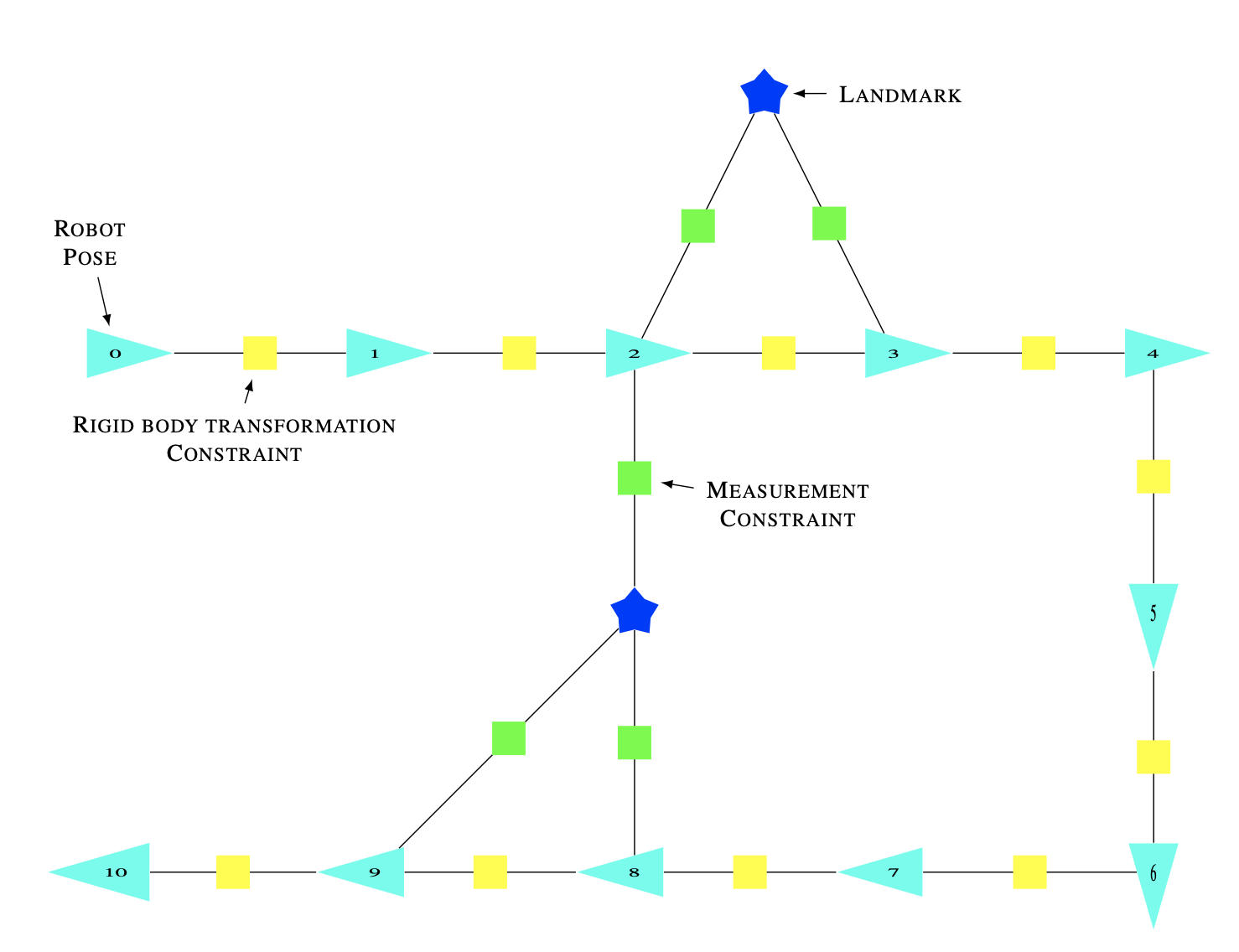
Factor Graph
Factor graph is a nice representation for optimization problems. It allow us to specify a joint density as a product of factors. It can be used to specify any function $\Phi(X)$ over a set of variables $X$, not just probability densities, though in SLAM, we normally use Gaussian distribution as the factor function.
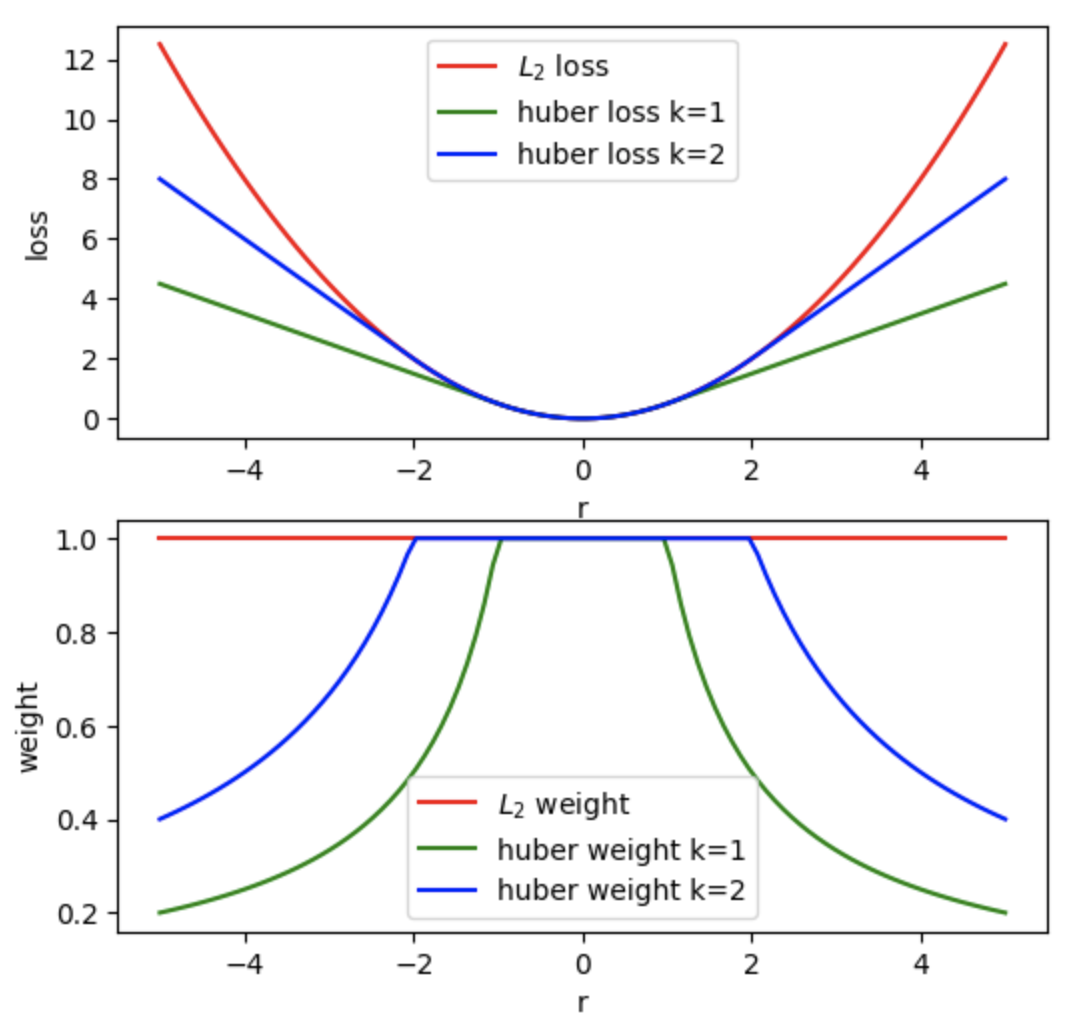
Robust Loss Functions for Least Square Optimization
In most robotics applications, maximizing posterior distribution is converted into a least square problem under the assumption that residuals follow Gaussian distribution. However, errors are not Gaussian distributed in practice. This makes the naive least square formulation not very robust to outliers with large residuals. In this post, we will first explore robust kernel approachs, then try to model residuals using Gaussian mixtures.
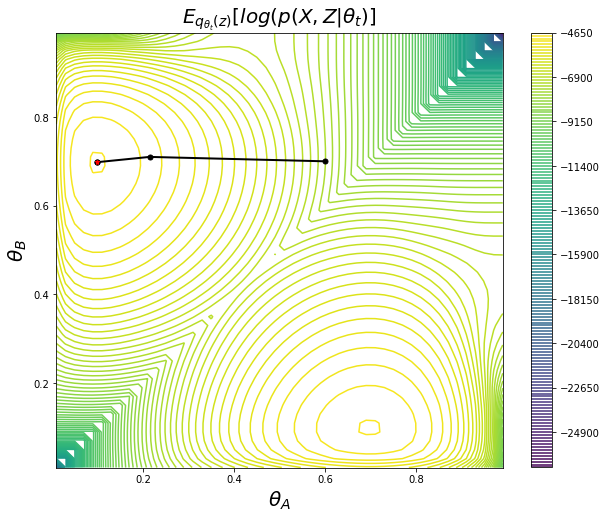
Expectation Maximization
Expectation–maximization (EM) algorithm is an iterative method to find (local) maximum likelihood or maximum a posteriori (MAP) estimates of parameters in statistical models, where the model depends on unobserved latent variables.
Gaussian Distribution Marginalization and Conditioning
A tutorial for Gaussian distribution marginalization and conditioning.
Torque and Angular Momentum
A tutorial for torque and angular momentum.
Covariance Visualization
A tutorial for covariance visualization.
Rigid Body Transformation
A tutorial for rigid body transformation.
Stereo Rectification
A tutorial for stereo rectification.
C++ Notes
This is a collection of C++ notes.
Machine Learning Notes
This is a collection of machine learning study notes.

Delicious Chinese Food!
Delicious Chinese authentic food...
Autonomous Robots
It contains all you need to build a software stack for autonomous robots!

Robots, Robots, Everywhere!
On the ground, in the air, robots, robots, everywhere! Up in space, beneath the seas, robots make discoveries.