Autonomous Robots - Non-linear Optimization
Motivation
 – Robot Arm Control (Non-linear Least Square)
– Robot Arm Control (Non-linear Least Square)
– Line Fitting (Linear Least Square)
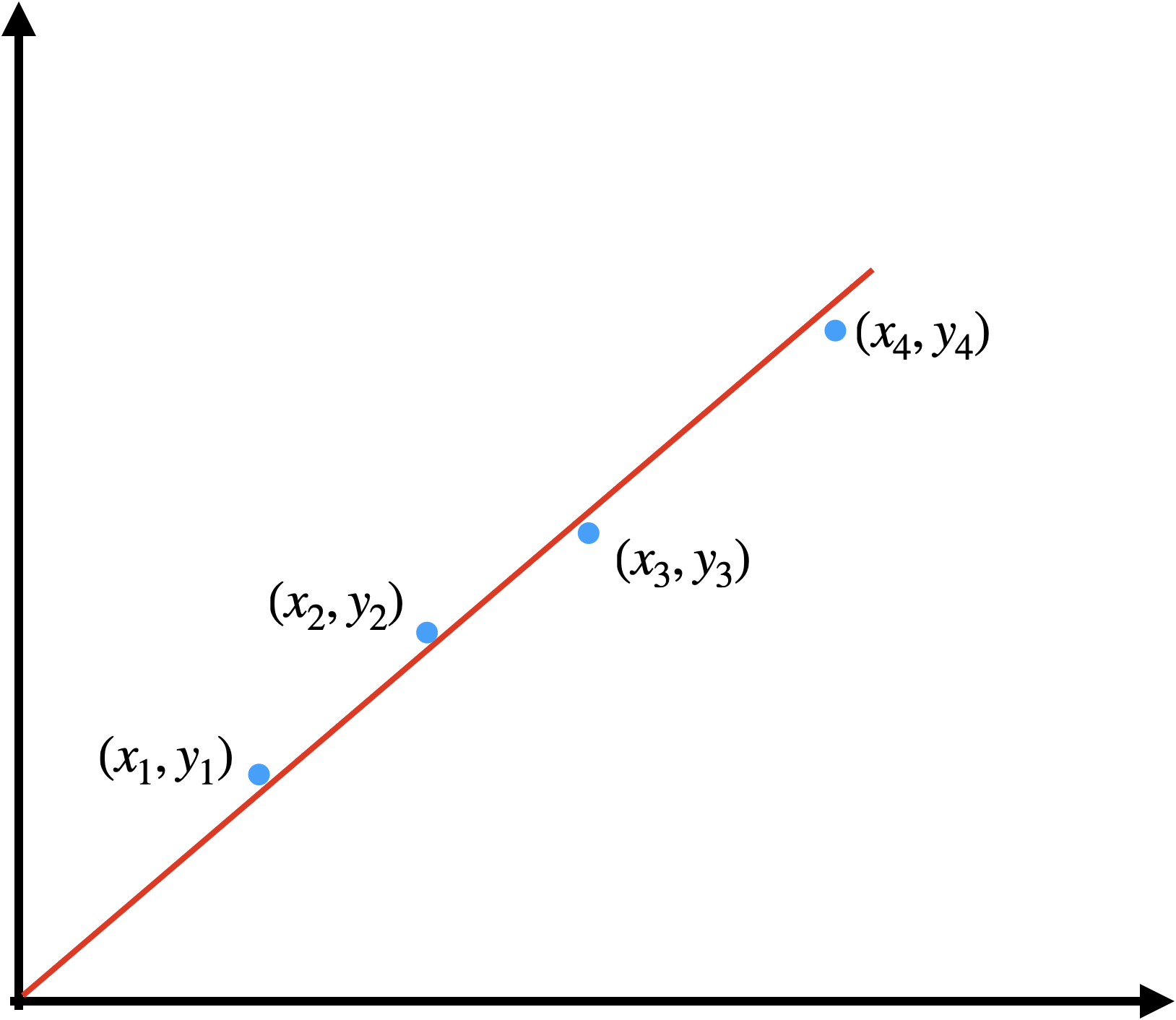
\[\textbf{x} = \underset{\alpha,\ \beta \in \mathbb{R}^n}{\operatorname{argmin}}(\|\alpha x_1 + \beta - y_1\|^2 + \|\alpha x_2 + \beta - y_2\|^2 + \|\alpha x_3 + \beta - y_3 \|^2 + \|\alpha x_4 + \beta - y_4\|^2) \\ = \underset{\alpha,\ \beta \in \mathbb{R}^n}{\operatorname{argmin}}( (\begin{bmatrix} x_1, 1 \end{bmatrix}\begin{bmatrix} \alpha \\ \beta \end{bmatrix} - y_1)^T(\begin{bmatrix} x_1, 1 \end{bmatrix} \begin{bmatrix} \alpha \\ \beta \end{bmatrix} - y_1) + (\begin{bmatrix} x_2, 1 \end{bmatrix}\begin{bmatrix} \alpha \\ \beta \end{bmatrix} - y_2)^T(\begin{bmatrix} x_2, 1 \end{bmatrix} \begin{bmatrix} \alpha \\ \beta \end{bmatrix} - y_2) \\ + (\begin{bmatrix} x_3, 1 \end{bmatrix}\begin{bmatrix} \alpha \\ \beta \end{bmatrix} - y_3)^T(\begin{bmatrix} x_3, 1 \end{bmatrix} \begin{bmatrix} \alpha \\ \beta \end{bmatrix} - y_3) + (\begin{bmatrix} x_4, 1 \end{bmatrix}\begin{bmatrix} \alpha \\ \beta \end{bmatrix} - y_4)^T(\begin{bmatrix} x_4, 1 \end{bmatrix} \begin{bmatrix} \alpha \\ \beta \end{bmatrix} - y_4) ) \\ = \underset{\alpha,\ \beta \in \mathbb{R}^n}{\operatorname{argmin}}( (\begin{bmatrix} x_1, 1 \\ x_2, 1 \\ x_3, 1 \\ x_4, 1\end{bmatrix}\begin{bmatrix} \alpha \\ \beta \end{bmatrix} - \begin{bmatrix} y_1 \\ y_2 \\ y_3 \\ y_4 \end{bmatrix})^T (\begin{bmatrix} x_1, 1 \\ x_2, 1 \\ x_3, 1 \\ x_4, 1\end{bmatrix}\begin{bmatrix} \alpha \\ \beta \end{bmatrix} - \begin{bmatrix} y_1 \\ y_2 \\ y_3 \\ y_4 \end{bmatrix}) ) \\ = \underset{\alpha,\ \beta \in \mathbb{R}^n}{\operatorname{argmin}}(\|A\begin{bmatrix} \alpha \\ \beta\end{bmatrix} - b\|^2)\]
Check Pseudo Inverse in Linear algebra to solve the minimization problem above.
Gauss–Newton
– Gradient
– Jacobian Matrix
– Gauss-Newton Algorithm
Written on February 12, 2021